En esta sección aprenderás a realizar una comunicación USB mediante la computadora y el microcontrolador PIC, el objetivo es enviar comandos al microcontrolador para encender y/o apagar los LEDs utilizando un monitor serial en la computadora.
Comunicación USB
La comunicación USB (Universal Serial Bus) funciona mediante un protocolo estandarizado que permite la transferencia de datos y la conexión de dispositivos electrónicos. El protocolo USB se basa en la estructura de «maestro-esclavo», donde un dispositivo actúa como el maestro (anfitrión) y controla uno o más dispositivos esclavos (dispositivos USB).
Microchip ofrece una variedad de microcontroladores PIC con capacidades USB integradas, lo que permite que estos dispositivos se comuniquen con una computadora o funcionen como dispositivos USB en sí mismos.
Monitor serial
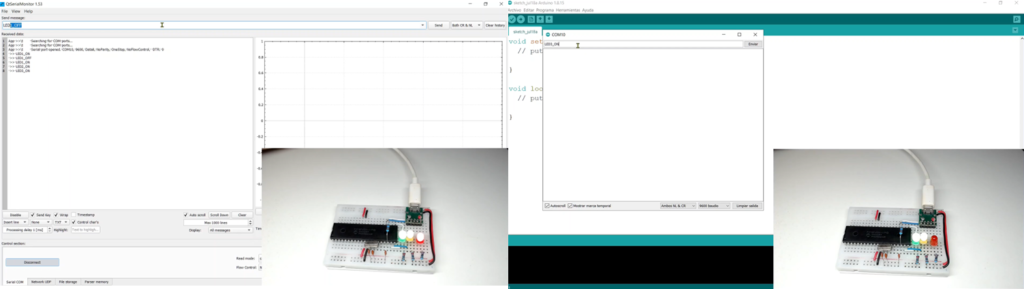
Para realizar la comunicación entre el microcontrolador y la computadora, se utiliza un monitor serial para enviar, recibir y graficar los datos.
Descarga en un archivo .zip, lo extraes en la computadora y abres la aplicación QTseralMonitor.
Inicialmente en el archivo .h se define el oscilador del microcontrolador, y se habilita la velocidad de la comunicación USB.
#use delay(clock=48MHz,crystal=20MHz,USB_FULL)
Se establece la corriente de funcionamiento necesaria para que el microcontrolador se conecte mediante USB.
#define USB_CONFIG_BUS_POWER 500 //500ma corriente de entrada
Para la comunicación USB se utiliza la siguiente librería.
#include "usb_cdc.h"
Se inicializa la comunicación USB.
usb_init();
En la subrutina recibe(), se recibe la cadena de caracteres o el comando, utilizando la función «usb_cdc_getc()» y en la sentencia «if()» espera el carácter «\r\n» para saber cuando terminara de recibir los datos.
void recibe()
{
memset(recibido, 0, sizeof(recibido)); //limpia los registros de la varible
int8 i=0;
while(true)
{
recibido[i] = usb_cdc_getc();//RECIBE EL CARACTER
if(recibido[i] == '\n')//busca el salto de linea \r\n
{
recibido[i-1] = '\0'; // \r = \0 (caracter nulo)
recibido[i] = '\0'; // \n = \0 (caracter nulo)
leds();
return;
}
i++;
}
}
En la subrutina «leds()» inicialmente se colocan los comandos que se pueden recibir para después hacer la comparación con los comandos recibidos.
Los siguiente es utilizar la función «strcmp()» para comparar el comando recibido con los diferentes comandos declarados, cuando la comparación resulta igual, la función devuelve «0» y entrara a la sentencia «if()» para encender o apagar el LED correspondiente al comando recibido.
result = strcmp(recibido, LED1_ON);//compara, si son iguales (0), no (+-1)
if(result==0)
{
OUTPUT_BIT(LED1,1);
return;
}//enciende el led1
result = strcmp(recibido, LED1_OFF);
if(result==0)
{
OUTPUT_BIT(LED1,0);
return;
}
.
.
.
Finalmente antes de colocar la librería «usb_cdc.h», se define la interrupción por recepción de datos USB, colocando la subrutina en este caso «recibe()» y después de definirla se declara la subrutina «void recibe();»
#define USB_CDC_ISR() recibe() //Interrupcion por recepcion de datos
void recibe();//Subrutina de la interrupcion
Código completo
#FUSES NOMCLR
#define USB_CDC_ISR() recibe() //Interrupcion por recepcion de datos
void recibe();//Subrutina de la interrupcion
#define USB_CONFIG_BUS_POWER 500 //500ma corriente de entrada
#include "usb_cdc.h"
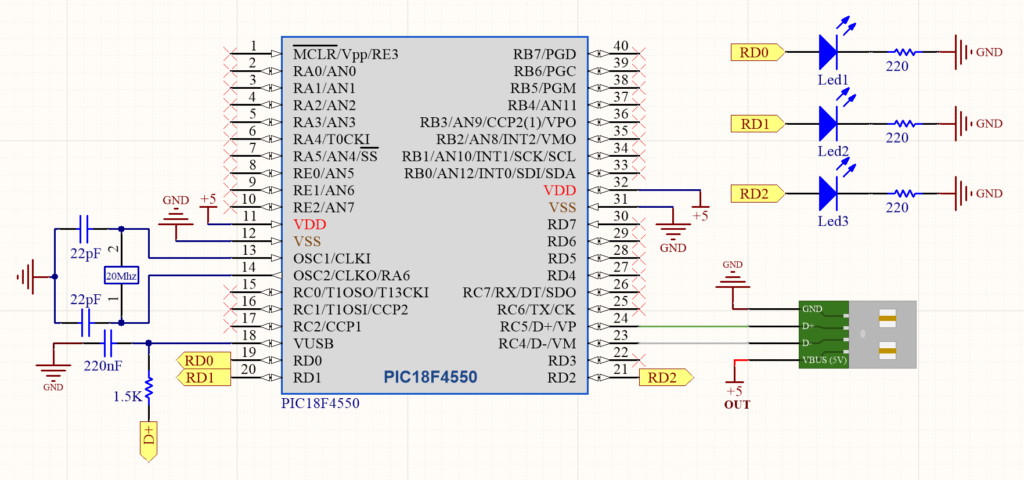
#define LED1 PIN_D0
#define LED2 PIN_D1
#define LED3 PIN_D2
char recibido[15];
void leds();
void recibe()
{
memset(recibido, 0, sizeof(recibido)); //limpia los registros de la varible
int8 i=0;
while(true)
{
recibido[i] = usb_cdc_getc();//RECIBE EL CARACTER
if(recibido[i] == '\n')//busca el salto de linea \r\n
{
recibido[i-1] = '\0'; // \r = \0 (caracter nulo)
recibido[i] = '\0'; // \n = \0 (caracter nulo)
leds();
return;
}
i++;
}
}
void leds()
{
signed int8 result;
char LED1_ON[8] = "LED1_ON";
char LED1_OFF[9] = "LED1_OFF";
char LED2_ON[8] = "LED2_ON";
char LED2_OFF[9] = "LED2_OFF";
char LED3_ON[8] = "LED3_ON";
char LED3_OFF[9] = "LED3_OFF";
while (true)
{
result = strcmp(recibido, LED1_ON);//compara, si son iguales (0), no (+-1)
if(result==0)
{
OUTPUT_BIT(LED1,1);
return;
}//enciende el led1
result = strcmp(recibido, LED1_OFF);
if(result==0)
{
OUTPUT_BIT(LED1,0);
return;
}
result = strcmp(recibido, LED2_ON);
if(result==0)
{
OUTPUT_BIT(LED2,1);
return;
}
result = strcmp(recibido, LED2_OFF);
if(result==0)
{
OUTPUT_BIT(LED2,0);
return;
}
result = strcmp(recibido, LED3_ON);
if(result==0)
{
OUTPUT_BIT(LED3,1);
return;
}
result = strcmp(recibido, LED3_OFF);
if(result==0)
{
OUTPUT_BIT(LED3,0);
return;
}
return;
}
}
void main()
{
usb_init();
while(TRUE)
{
//TODO: User Code
}
}