En esta sección aprenderás a programar un sensor para la detección de obstáculos utilizando un LED infrarrojo y un fototransistor, activando una alarma con un Buzzer al detectar un objeto en un rango de detección establecido.
Módulo de obstáculos
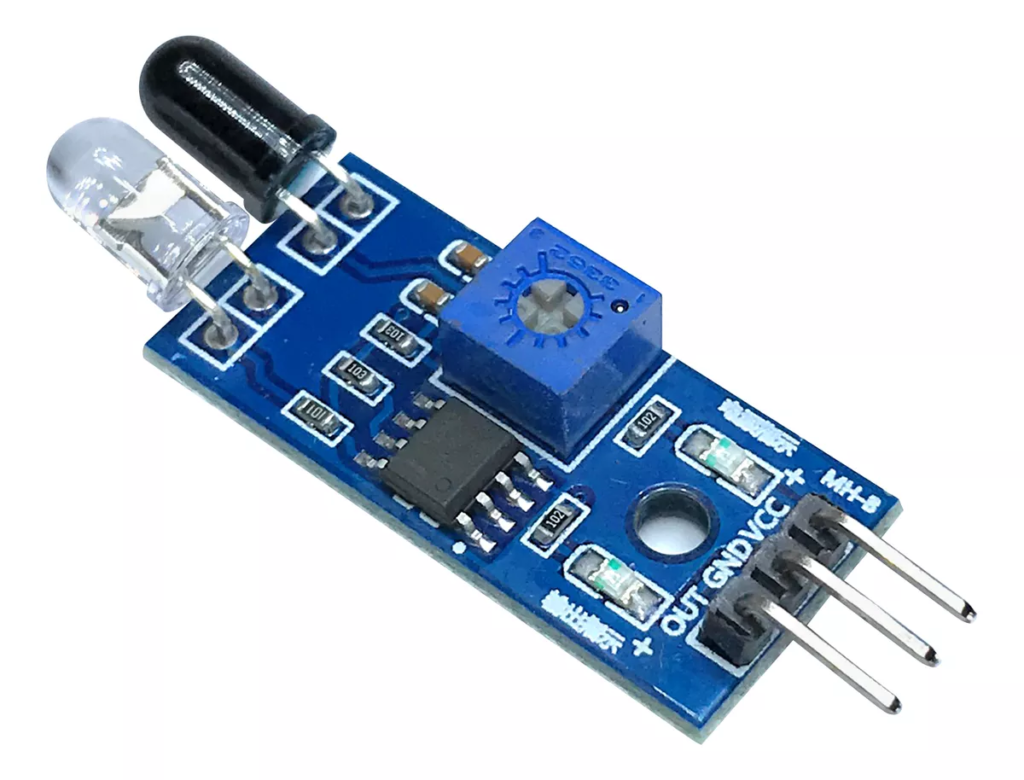
El Módulo Sensor De Obstáculos Reflectivo Infrarrojo es un dispositivo optoelectrónico activo capaz de medir proximidad por infrarrojo IR, esta compuesto por un transmisor que emite energía infrarroja IR y un receptor que detecta la energía IR reflejada por la presencia de cualquier obstáculo en la parte frontal del módulo.
Características
Modelo: FC-51 / HW-201
Chip de funcionamiento: LM393
Voltaje de alimentación: 3.3V – 5V
Voltaje de salida digital : 5V
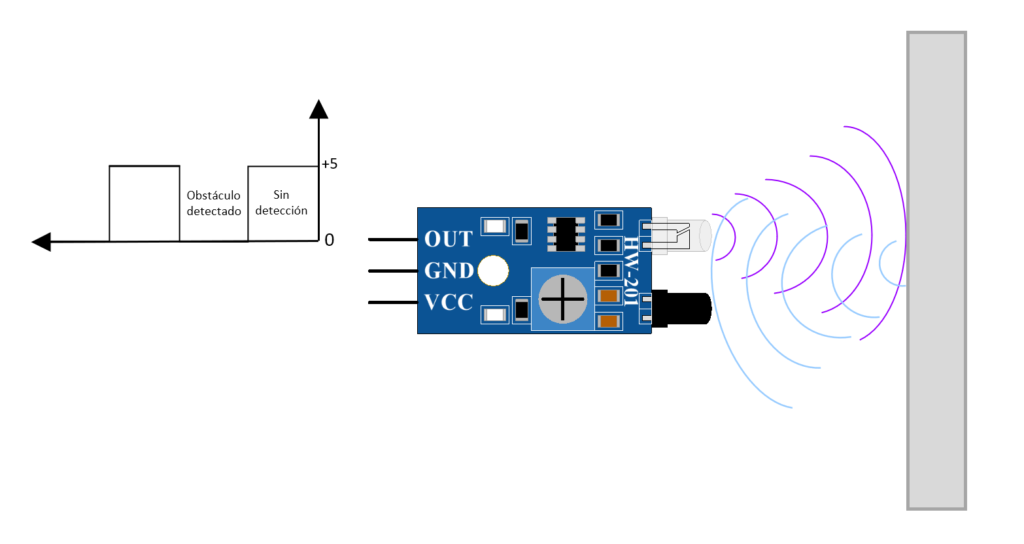
Distancia de detección: 2 cm – 30 cm (ajustable con potencimetro)
Angulo de detección: 35°
Pines:
VCC: Voltaje de alimentación
OUT: Salida de tensión digital (0,1)
GND: Tierra
Funcionamiento
La señal del sensor sera de «1» o «alta» sí no existe un obstáculo y la señal sera de «0» o «baja» cuando existe un obstáculo.
Buzzer activo
El buzzer activo es un componente electrónico que produce un sonido cuando se le aplica un voltaje eléctrico de 5V DC. A diferencia de un buzzer pasivo, es que requiere una señal de onda para producir sonido, un buzzer activo tiene un circuito interno que genera su propio tono.
Características
Voltaje de operación: 5V
Corriente máxima: 30 mA
Dimensiones:12 mm x 9.5 mm
Peso: 2 g
Frecuencia de resonancia: 23K Hz
Salida de sonido mínimo a 10 cm: 85 dB
Pines
VCC (+)
GND
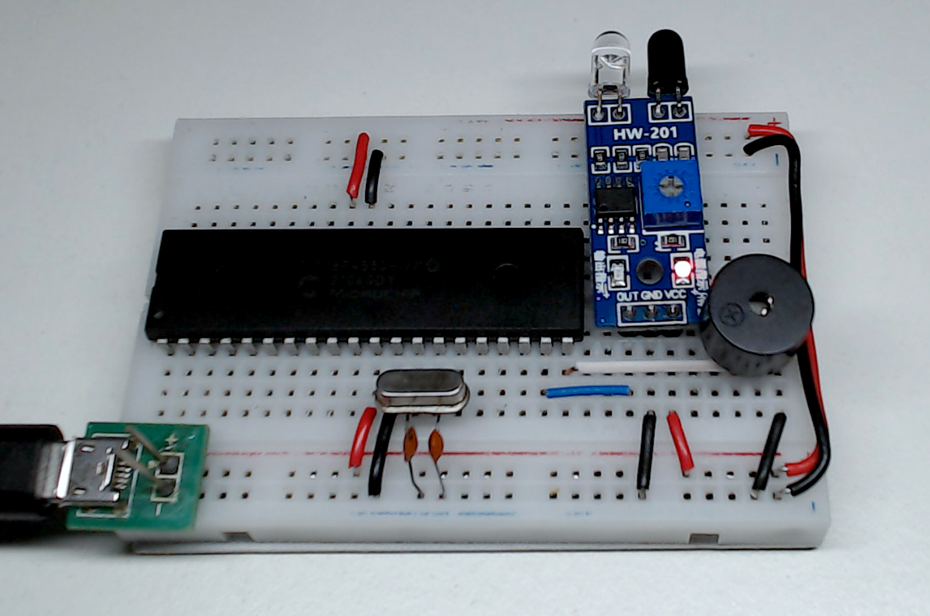
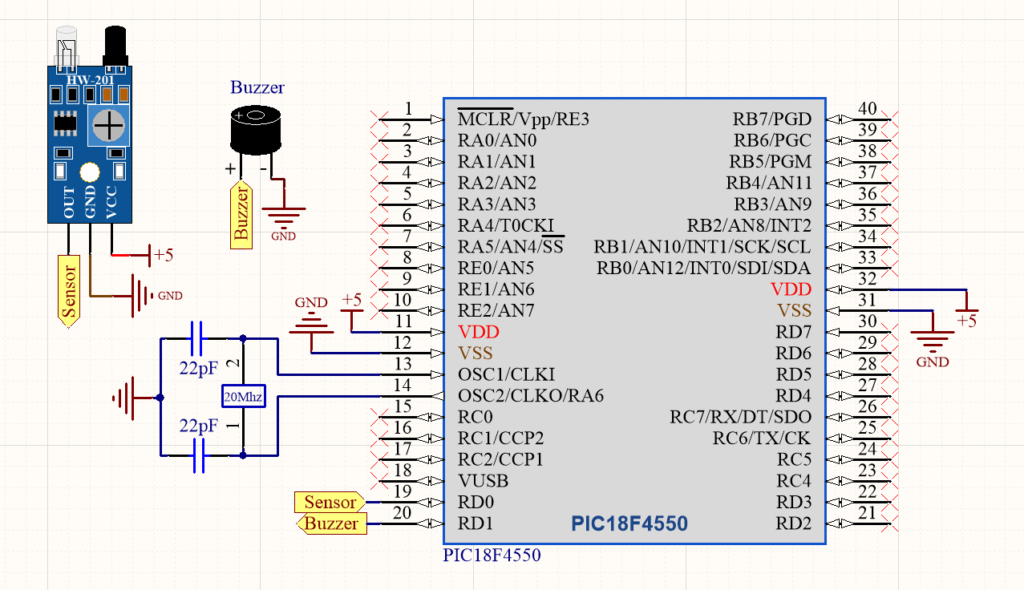
Circuito de conexión
Procedimiento
Se define la entrada del sensor en el «pin_d0» y se define la salida de la señal para encender el Buzzer en el «pin_d1».